Kraken project and the RockBLOCK
‘Kraken’ is a project by Sutton Grammar School. The main concept behind the buoy is its primary use as an oil response system. The system is based around an oil response unit that aims to make it easier for oil companies to clean up spills quickly and effectively.
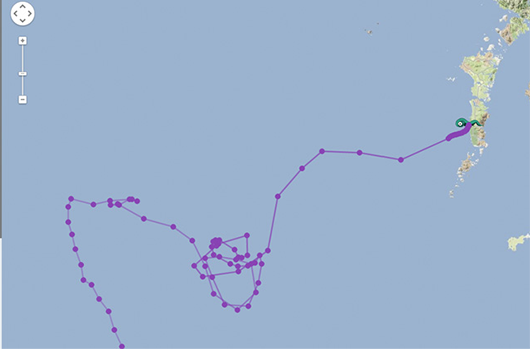
It consists of a series of buoys that cooperate to give an image of the spread of oil by using sophisticated GPS and radio technology. Using this, companies can get a picture of where oil has and will spread and then clean up spills as fast as possible.
The RockBLOCK is used to transmit the GPS position and other collected data back to a central management system to allow monitoring of the situation in near real-time.
Components of the Kraken buoy:
- Arduino Atmega328 controller
- uBlock Max 6Q
- Inertial and Temp Sensors
- RockBLOCK naked unit.
In more detail…
GPS – U-blox Max 6Q
These determine the location of each buoy as a latitude and longitude, and provide accurate synchronised timekeeping (GPS time) for all buoys. GPS modules communicate with the Arduino via the UBX binary protocol over a serial RS232 interface and use Sarantel SL1202 (now discontinued) antennae. The modules have been optimised for 2-D ocean use in power-saving mode (positional fix every five minutes). We used these receivers partly because they’re very small (so will fit into the ‘nymphs’) can be put into low power mode to extend the battery life of the buoys while at sea.
Hope Microelectronics RFM22B Transceiver
[Short Range Radios]
These are low-power boards used for short range communications (sending GPS data) between buoys in the Poseidon network. We used this open source Arduino library for easy communication between the Arduino and radio modules. Packets of data are automatically encoded and decoded, further simplifying the Arduino programming.
Arduino Atmega328
This microprocessor chip is used by the Arduino Uno board (but is in surface mount form on our buoys). They are programmed in C with the Arduino IDE version 1.0.1 and coordinate the behaviour of each buoy, decoding and relaying data from various components, e.g. the GPS receivers or the IMU out to the RockBLOCK radio.


Buoy Network Concept
We aimed to fully utilise the benefits of an entire network of buoys by allowing the ‘nymphs’ to relay each other’s transmissions to the ‘Kraken’, in case some drift out of range of the RFM22B radios. Each nymph broadcasts the GPS data it has stored in its memory to all other buoys, which receive and store this data in their own memories. This means that each time a buoy transmits its memory contents, it is transmitting GPS data on behalf of all the other buoys (not just its own location).
So if a buoy moves out of range of the ‘Kraken’, its data will still reach the Kraken providing that other nymphs are still in range to act as relays. The Kraken collects all these data transmissions to send back to us via the Iridium constellation, enabling us to track the location of each buoy in the network whilst using only one RockBLOCK radio.

Kraken Buoy Features
Iridium Satellite Constellation

Inertial Measurement Unit (IMU)
Additional sensors

Supporting Educators
If you'd like to get in touch with the team either to discuss an opportunity or project similar to that of the one above, or something completely different our team of experts will be happy to provide objective advice.
